
Nehmen wir einfach einmal an, Segelfliegen wäre Ihr Hobby.
Wenn Sie Sonntag morgens (früh) aufstehen, um zu Fuß, mit dem Fahrrad oder mit dem Auto zum Flugplatz zu gehen bzw. zu fahren, machen Sie sich sicher keine Gedanken mehr darüber, welchen Weg Sie dafür nehmen, wo Sie abbiegen müssen oder wie lange Sie für diese kleine Reise unterwegs sind. Schließlich legen Sie diese Strecke heute ja nicht zum ersten Mal zurück. Ihr Gehirn hat die Route gespeichert, und auch wenn Sie unterwegs an etwas ganz anderes denken, werden Sie sicher an Ihrem Ziel ankommen.
Wie war dies jedoch früher? Sie wussten zwar, dass es in Ihrer Stadt einen Flugplatz gibt. Vielleicht haben Sie sogar schon die startenden und landenden Flugzeuge von Ihrem Garten oder Balkon aus gesehen, doch was haben Sie unternommen, um auf dem kürzesten Wege dorthin zu finden?
Vielleicht nahmen Sie einen Stadtplan zur Hand, nach der Methode: geradeaus ungefähr 200m, dann die dritte Straße links, über den Bahnübergang, an der Schule vorbei und nach dem Ortsschild noch einmal ungefähr sechshundert Meter... Oder Sie fragten einen Nachbarn, der Ihnen den Weg erklärte ... Oder sind Sie einfach losgezogen nach der Methode "Trial and Error", hoppla, eine Sackgasse, umdrehen und zurück, dann vielleicht nach links, dort müsste es sein, denn viele Wege führen nach Rom ...
Ob bewusst oder unbewusst: Sie haben sich hier bereits mit einem Teilgebiet der Navigation befasst.
Der Begriff "Navigation" kommt aus dem Lateinischen: navigare = zur See fahren. Zunächst meinte man damit alle Tätigkeiten, die mit dem Führen eines Schiffes zusammenhingen. Bald jedoch war damit nur noch das "sich Zurechtfinden" auf dem Meer gemeint. Tagelang konnte man keine markanten Punkte ansteuern und entwickelte deshalb verschiedene Verfahren, um auf dem schnellsten Weg das gewünschte Ziel zu erreichen.
Mit dem Beginn der Luftfahrt und später auch der Raumfahrt wurde dieser Begriff einfach übernommen. Hier gilt die Navigation als ein präzises Verfahren zur Richtungs- und Entfernungsbestimmung und allem, was damit im Zusammenhang steht.
Damit läßt sich die Navigation in ihrer einfachsten Form folgendermaßen definieren:
Wie gelange ich von einem bekannten Punkt, dem Ausgangspunkt, an dem ich mich befinde, zu einem anderen bekannten Punkt, welcher nicht unmittelbar sichtbar sein muss.
Um diese Aufgabe zu erfüllen, haben sich im Laufe der Zeit fünf praktische Methoden der Navigation entwickelt:
1. Navigation durch das Feststellen der gegenwärtigen Position in Bezug auf die Umgebung
2. Navigation mit Kompass, Karte und Uhr
3. Navigation nach den Sternen
4. Autonome Navigation mit Beschleunigungsmessern und Gyratoren
5. Bodengestützte aktive und passive Radionavigation
Versuchen wir nun festzustellen, wie sich diese fünf Navigationsarten im wesentlichen voneinander unterscheiden.
Navigation durch das Feststellen der gegenwärtigen Position in Bezug auf die Umgebung
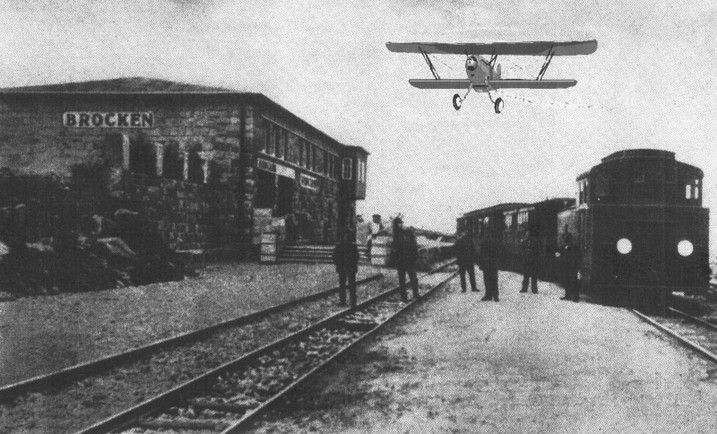
Diese Methode ist die einfachste und die am meisten verwendete. Im engl. Sprachgebrauch wird sie als Piloting bezeichnet. Man wendet sie beim sonntäglichen Gang (oder bei der Fahrt mit dem Auto), z.B. zum Flugplatz, genauso an, wie auf dem Weg zur Kirche oder zur Pizzeria um die nächste Ecke. Skipper orientieren sich an Häfen, Brücken und Bojen, deren Namen sie kennen. Autofahrer richten sich nach den Schildern der Landstraßen oder Autobahnen. Piloten in den 30er und 40er Jahren orientierten sich im Tiefflug an den Beschriftungen von Bahnhöfen (es soll mal ein Pilot gemeint haben, er sei in einer Stadt namens Männer, bevor er auf einer anderen Tür am Bahnhof das Wort Frauen las) und flogen an den Gleisen entlang von einer bekannten Stadt zur nächsten (man sagte mir, Ultraleichtpiloten sollen diese Methode teilweise heute noch anwenden).
Für diese Navigationsmethode benötigt man nur die im Kopf gespeicherten Informationen, die Erinnerungen. Schwierig wird es allerdings auf oder über dem Meer, wenn es an markanten Punkten fehlt. Als Pilot eines Flugzeuges ist man noch im Vorteil, kann man doch durch das Wählen einer größeren Flughöhe (soweit die flugrechtlichen Vorschriften und das Wetter mitspielen) eine Erweiterung des Horizontes herbeiführen. Der Kapitän eines Schiffes aber muss auf eine andere Navigationsmethode ausweichen, da gerade in Gegenden mit Untiefen ein Navigationsfehler verheerende Folgen haben kann.
Navigation mit Karte, Kompass und Uhr
Bewegt man sich von einem bekannten Punkt weg, kann man durch Messen des zurückgelegten Weges zu jeder Zeit die neue Position bestimmen. Dazu muss man die Richtung und die Länge des zurückgelegten Weges kennen. Durch ein Aneinanderreihen dieser Teilstrecken hangelt man sich oder "koppelt", wie der Fachmann sagt, von einem Ort zum nächsten. Daher auch der Name Koppelnavigation.

Zum Feststellen der Richtung benützt man im einfachsten Fall einen Kompass. Für die Berechnung oder Messung der zurückgelegten Entfernung genügt in einem Landfahrzeug ein Kilometerstandanzeiger. In einem Wasserfahrzeug und im Flugzeug dagegen benötigt man statt dessen durch den fehlenden Kontakt zur Erde einen Geschwindigkeitsmesser und eine Uhr.
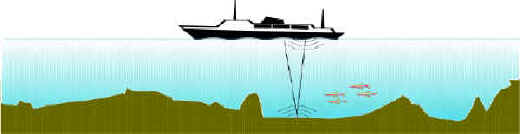
In der Praxis wird die Geschwindigkeit eines Schiffes gegenüber dem ihm umgebenden Wassers mit dem Log gemessen. Dies ist ein unter der Wasseroberfläche an einem strömungsgünstigen Ort angebrachtes Flügelrad, dessen geschwindigkeitsabhängige Umdrehungszahl pro Zeiteinheit ein entsprechendes Signal abgibt. Im Flugzeug dagegen ermittelt man die Geschwindigkeit durch Messen des Stau- oder des Unterdruckes mit Hilfe einer speziellen Düse, wobei das Anzeigegerät vom Prinzip her ein Druckmessgerät ist, jedoch die Eichung in Kilometer oder Meilen pro Stunde vorgenommen wird. Wie diese Messgeräte funktionieren und welche physikalischen Effekte dabei genützt werden, erfahren Sie im Kapitel 4 (Mechanische und elektronische Navigationsmeßgeräte).
Schon Charles Lindbergh benutzte die Koppelnavigation bei seinem Atlantiküberflug im Jahre 1927 und gab ihr den Namen ded reckoning. Dies steht für deduced reckoning was soviel bedeutet wie "herbeigeführte" oder "abgeleitete Berechnung". In Erinnerung an viele Piloten, die zu dieser Zeit beim Versuch den Nordatlantik zu überqueren durch Navigationsfehler ihr Leben verloren, hat sich diese Bezeichnung ein klein wenig gewandelt und wird bis heute "dead reckoning" geschrieben. Die gebräuchlichste deutsche Bezeichnung dafür ist Koppelnavigation.
Die Koppelnavigation, ausgeübt in der Luft und auf See, erfordert viel praktische Erfahrung, da hier sehr viele Fehlerquellen vorhanden sind. Fehlanzeigen des Kompasses durch die Inklination (ein Fehler, der durch die schräg verlaufenden Feldlinien des Erdmagnetfeldes entsteht), das Nichtübereinstimmen des geographischen und magnetischen Nordpols und der nicht äquidistanten Feldlinien durch die Deklination sowie Wind- und Strömungseinflüsse machen ständige Korrekturen nötig.
 Diese Korrekturen sind nur möglich durch das kontinuierliche Verfolgen und Einzeichnen des aktuellen Kurses auf einer Karte und das Miteinbeziehen von Landmarken, soweit dies möglich ist.
Diese Korrekturen sind nur möglich durch das kontinuierliche Verfolgen und Einzeichnen des aktuellen Kurses auf einer Karte und das Miteinbeziehen von Landmarken, soweit dies möglich ist. Für die Kurskorrektur in der Schiffahrt hat das in der Antike bereits angewandte Grundprinzip der Lotung wieder an Interesse gewonnen, da man durch die inzwischen präzise ausgearbeitete Seekarten das Tiefenprofil längs der geplanten Fahrstrecken sehr gut kennt.
Navigation nach den Sternen
Diese älteste Navigationsart bedient sich der Tatsache, dass der Himmel sich an jedem Ort auf der Erde zu einem bestimmten Zeitpunkt anders zeigt. Bereits 1100 vor Chr. segelten die Phönizier durch die Straße von Gibraltar in den Atlantik. Auf ihren Reisen nach Madeira und auf ihren Fahrten bis nach Cornwall orientierten sie sich bereits nach den Gestirnen.
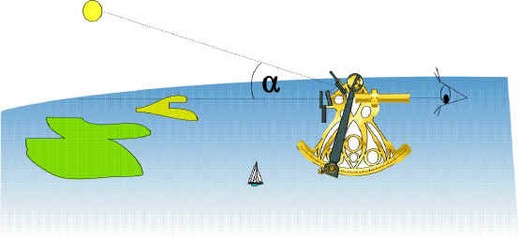
Das erste richtige Meßgerät zur Bestimmung der Gestirnshöhe war der durch die Portugiesen um 1420 nach Chr. eingeführte Jakobsstab, der bald darauf durch den Spiegelsextanten abgelöst wurde.
Mit diesem astronomischen Instrument kann man eine Ortsbestimmung durchführen, indem man zunächst die Winkel zwischen den Sternen, dem Mond und/oder der Sonne und dem wahren Horizont zu einer bestimmten Zeit mißt. In Verbindung mit einem nautischen Almanach (Nachschlagewerk) läßt sich so eine Positionsbestimmung durchführen. Auf speziellen Karten sind bereits Standlinien eingetragen, die zu bestimmten Sternen, Zeiten und den Höhen (Winkeln) über dem Horizont gehören. Aus diesem Almanach kann man nach der Beobachtung direkt die zugehörigen Standlinien aussuchen. Führt man dies für zwei verschiedene Himmelsobjekte durch, für die sich die Standlinien kreuzen, erhält man mit dem Schnittpunkt dieser Standlinien bis auf weniger als eine Seemeile genau die gegenwärtige Position.
Autonome Navigation mit Beschleunigungsmessern und Gyratoren
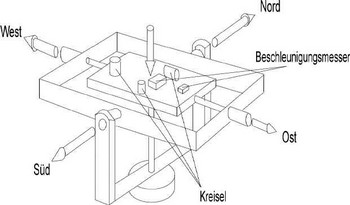
Diese als Trägheitsnavigation bekannte Methode (engl. Inertial Navigation) verwendet zur Positionsbestimmung mechanische oder elektrische bzw. optoelektronische Beschleunigungsmesser und Gyratoren, so genannte Kreisel oder Kreiselsysteme. Sie liefern Signale über Geschwindigkeit und Richtung eines Land-, Wasser- oder Luftfahrzeuges, die von einem Computer ausgewertet werden.
 Je nach Leistungsfähigkeit des Computers erfolgt dies in Echtzeit, d.h. zu jedem Zeitpunkt kann die momentane Position in allen drei Koordinaten an einem Display abgelesen werden oder direkt eine grafische Einblendung der Position in eine Karte erfolgen.
Je nach Leistungsfähigkeit des Computers erfolgt dies in Echtzeit, d.h. zu jedem Zeitpunkt kann die momentane Position in allen drei Koordinaten an einem Display abgelesen werden oder direkt eine grafische Einblendung der Position in eine Karte erfolgen.Erst solche Kreiselsysteme machten die sichere Atlantiküberquerung möglich, da sie völlig autark arbeiten und damit nicht an Funkreichweiten gebunden sind.
Abb. 1.4 zeigt den prinzipiellen Aufbau einer Inertialplattform. Die Kreisel dienen der Stabilisierung und die Beschleunigungsaufnehmer messen jegliche Bewegungsänderung in allen drei Achsen.
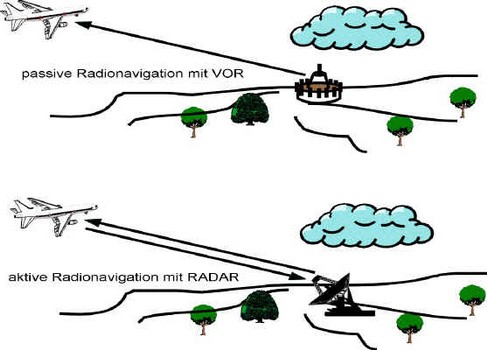
Bodengestützte aktive und passive Radionavigation
Bei der Radionavigation verwendet man elektromagnetische Wellen, deren Eigenschaften heute sehr gut erforscht sind. Man unterscheidet hierbei zwischen passiver und aktiver Funk- oder Radionavigation. Alle Navigationsverfahren, bei denen die elektromagnetischen Wellen nur einen Weg zurücklegen (z. B. von einer Feststation zum Land-, Wasser- oder Luftfahrzeug) zählen zur passiven Radionavigation. Dagegen werden die Navigationsverfahren, bei denen man selbst (aktiv) einen Sendeimpuls erzeugt, der von einer Feststation (oft auf einer anderen Frequenz) beantwortet und als Sekundärsignal zurückempfangen wird, zur aktiven Funknavigation gezählt, da man selbst in die Funkwellenausbreitung eingreift.
Zur aktiven Funknavigation gehören Entfernungsmeßverfahren (DME=Distance-Measurement-Equipment), Sekundär-Radargeräte und die hauptsächlich militärisch genutzten taktischen Anlagen
VORTAC und TACAN. Alle diese Verfahren beruhen dabei auf einer Laufzeitmessung elektromagnetischer Wellen, deren Ausbreitungsgeschwindigkeit 300.000 km pro Sekunde beträgt. Man erzeugt selbst ein Sendesignal und mißt die Zeit, bis es von einem reflektierenden Gegenstand wieder als Echo zurückkehrt oder bei einer geeigneten Gegenstation eine Sendeaktion auslöst, auf deren Empfang man zur Auswertung entsprechend vorbereitet sein muss.
Bei der passiven Funknavigation nutzt man im einfachsten Fall die Infrastruktur verschiedenster Sendernetze, die es auf der ganzen Erde gibt. Dies sind sowohl spezielle Sendernetze für die Navigation als auch ganz normale Rundfunksender. Mittels einer Richtantenne bestimmt man eine Standlinie auf die eigene Position, bezogen auf die Längsachse seines Land-, Wasser- oder Luftfahrzeuges oder eines bekannten Ortes, z.B. des Nordpols.
Da man hier die Peilung selbst vornimmt, spricht man von der Eigenpeilung. Im Gegensatz dazu wird bei der Fremdpeilung die Bestimmung der Standlinie von der Gegenstation vorgenommen. Das Ergebnis erhält man in der Regel per Sprechfunk als Winkelgröße mitgeteilt. Der Fachmann spricht hier vom QDM (Richtung zum Sender) oder vom QTE (Richtung vom Sender = QDM + oder - 180 Grad). Diese Winkelangaben beziehen sich dabei stets auf den magnetischen Nordpol.
Alle Eigen- und Fremdpeilungen zur Standlinienbestimmung mit meist rundstrahlenden Sendestationen (Radiosender, NDBs), deren Standorte dem Benutzer allerdings bekannt sein müssen, sowie die meisten Richt- und Drehfunkfeuer (VOR, CONSOL) und alle Hyperbelnavigationsverfahren (LORAN, DECCA, OMEGA) zählen zu den passiven Funknavigationsarten. Hier merkt der Betreiber des Systems nicht, ob dessen Dienstleistung genutzt wird, da kein aktiver Eingriff in das Geschehen erfolgt.
Bis auf das legendäre RADAR und einige wenige Verfahren der Luftfahrt, werden heute ausschließlich passive Funknavigationsverfahren eingesetzt, da hier das Verursacher/Nutzer-Verhältnis in Bezug auf die Erzeugung elektromagnetischer Wellen unabhängig von der Anzahl der Empfänger ist.
So betrachtet zählt auch das GPS-System zur passiven Funknavigation.